東京都市大学 工学部機械工学科 機械力学研究室
Mechanical Dynamics Laboratory, Tokyo City University
〒158-8557 東京都世田谷区玉提1-28-1
世田谷キャンパス 10号館3階
2023年度 研究テーマ
![]() 6分力ホイールセンサにおける荷重伝達の検討
6分力ホイールセンサにおける荷重伝達の検討
![]() 指標Ustarを用いた剛性線導出システムの構築
指標Ustarを用いた剛性線導出システムの構築
![]() 縮尺ダミー模型を用いた衝突安全性の向上に関する研究
縮尺ダミー模型を用いた衝突安全性の向上に関する研究
![]() 自動車前面衝突時における胎盤位置による胎盤早期剥離の検討
自動車前面衝突時における胎盤位置による胎盤早期剥離の検討
![]() 自転車乗員のためのAACNの構築に関する研究
自転車乗員のためのAACNの構築に関する研究
![]() 衝突角度が及ぼす頭部傷害値の検討
衝突角度が及ぼす頭部傷害値の検討
![]() 剖検例に基づく大型二輪車乗員の傷害解析
剖検例に基づく大型二輪車乗員の傷害解析
![]() ボラードと自動車の衝突事故における鑑定手法の研究
ボラードと自動車の衝突事故における鑑定手法の研究
![]() パーソナルトランスポーターの隊列走行制御システムの研究
パーソナルトランスポーターの隊列走行制御システムの研究
![]() 電動キックボードのシミュレータ構築に関する研究
電動キックボードのシミュレータ構築に関する研究
![]() 自動車の遠隔操縦における車幅間隔の認知に関する研究
自動車の遠隔操縦における車幅間隔の認知に関する研究
![]() 操舵支援システムに対するドライバの適応に関する研究
操舵支援システムに対するドライバの適応に関する研究
![]() 高速道路における自動運転トラックの合流制御アルゴリズム
高速道路における自動運転トラックの合流制御アルゴリズム
![]() ファジイ推論を用いた自動運転バスの制御ゲインのセルフチューニング
ファジイ推論を用いた自動運転バスの制御ゲインのセルフチューニング
![]() 歩行者と超小型モビリティが親和する自動走行経路の設計
歩行者と超小型モビリティが親和する自動走行経路の設計
6分力ホイールセンサにおける荷重伝達の検討
概 要
6分力ホイールセンサは,センサ各部でひずみを計測することで走行時の路面入力を計算するセンサであり,車両挙動の解析や車両挙動のシミュレーションデータの収集等に用いられる.ホイールセンサには耐荷重性能や検出精度の向上が求められており,設計においてはホイールセンサ内の荷重伝達を把握することが重要である.昨年度の検討においては,クロストークを抑制する構造改善の指針を提案し,クロストークが制御されるメカニズムの解明することができた.本研究では,このモデルを基に更なるWFSの構造改善指針を目指し,重力等のパラメータを設定することで実機実験との精度の高い合わせこみを行う.またタイヤモデルを用いることで校正試験のみでなく実車装備時の出力を再現し,ホイールセンサとしての性能を向上させることを目標とする.
メンバー
中村 (M1) 上 (B4) 平澤 (B4)

指標Ustarを用いた剛性線導出システムの構築
概 要
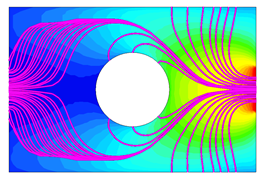
構造物における荷重が伝達する経路である剛性線を把握することで,構造各部の機能を明らかにしながら設計を進めることが可能となる.そこで,荷重伝達を定量的に表現する手法として指標Ustarおよび近似的な剛性線導出の手法が提案されている.本研究では,既存のシステムにおける課題点を解決し,複数種類の要素で構成された車体モデルにおいて,Ustarの勾配に基づく厳密な剛性線を導出するシステムの構築を行う.さらに複数導出した剛性線の中から最も強い荷重伝達経路を定量的に見出す手法の開発を目指す.これにより複雑な構造物における剛性線の評価方法を確立することで,荷重伝達の観点から優れた構造の設計に活かす.
 |
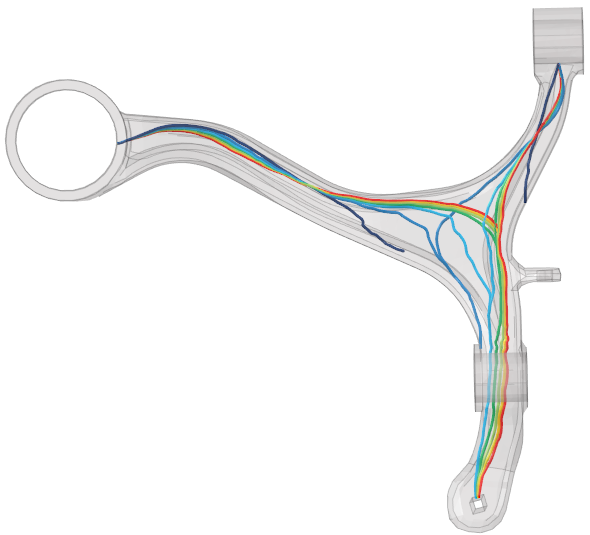 |
| 円孔板の剛性線 | 車体モデル(ロアアーム)における剛性線 |
メンバー
志賀 (M2)
縮尺ダミー模型を用いた衝突安全性の向上に関する研究
概 要
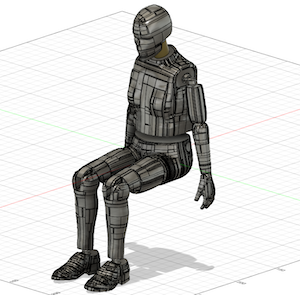
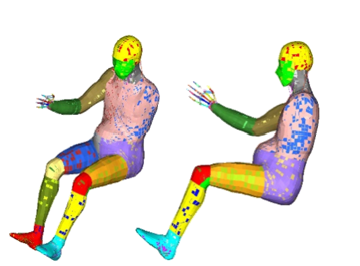
高齢化によって,交通事故において他の年齢層に比べて致死率が約7倍高いとされている高齢者の増加や自動車乗車中の死亡者数,重傷者数の割合の高さなどから自動車衝突における安全性の向上,検討を行う必要性は高いと考える.ところが実車実験には広大なスペースが必要,コストが高い,後処理に労力がかかる等といった問題がある.それに対し縮尺模型を用いた模型実験では,広大なスペースを必要としない,コストがかからない,後処理に労力がかからない,実験回数が多く取れる等といった利点が挙げられる.本研究では模型による実験の妥当性を検証し,傷害値を求めることで衝突安全性向上の検討をすることを目的とする.
 |
 |
| 3D-CADによる縮尺模型形状 | 1/5縮尺の衝突用ダミー模型 |
メンバー
松本 (M1) 五傳木 (B4) 正木 (B4)
自動車前面衝突時における胎盤位置による胎盤早期剥離の検討
概 要
現在,日本では第10次交通安全基本計画の中で子供などの交通弱者の安全の確保が重要とされており,子供の安全を確保する上で胎児の段階からも交通安全を検討する必要があるため,妊婦と胎児の交通障害を予防することが求められている.
高速域の交通事故における胎児の死因の断定は困難だが,低速域の交通事故における胎児の死因の50%〜70%が胎盤早期剥離であることが知られている.
また,胎盤の位置によって自動車前面衝突時における子宮と胎盤への影響も異なる.
本研究では,子宮と胎盤の応力を算出可能な再現モデルを作成し,各胎盤位置における自動車前面衝突時の負荷による胎盤の剥離条件,剥離抑制方法について検討を行う.
 |
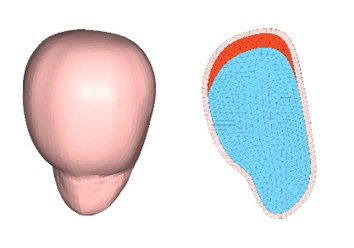 |
| 妊婦FEモデル | 胎盤を再現した子宮FEモデル |
メンバー
田村 (M1) 高橋 (B4)
自転車乗員のためのAACNの構築に関する研究
概 要
令和元年の状態別交通事故死者数の交通弱者の割合は66%を占めている.そのため,交通弱者のための先進事故自動通報システム(以下,AACN)が実用された際の人命救助に関わる効果が期待される.本研究では,スマートフォンに着目し,内部に搭載されている加速度計を用いることで、自動車との衝突時の加速度などの情報からトリアージを行うことが出来るAACNアルゴリズムの構築を目的とする.
本年度はMadymo解析ソフトを用いて実車衝突実験をCAE解析にて再現し、傷害値などの観点から問題点を探求しAACNの実装化に役立てる.
 |
 |
| 実車衝突実験 | CAE解析モデル |
メンバー
田村 (M1) 岡下 (B4) 根岸 (B4)
衝突角度が及ぼす頭部傷害値の検討
概 要
令和3年の日本国内での労働災害発生状況において,墜落・転落事故における死亡災害は28%を占める.本事故では墜落高さが高いほど重症化することが予想される.しかし,高さが低い場合でも頭部から墜落することにより,重症化や死亡事故につながる可能性がある.そこで墜落・転落事故での転落挙動を予測し,重症化を防ぐ対策が求められる.また,種々の転落要因による転落挙動の変化についての解析が重症化及び死亡率低下に繋がると考えられる.
本研究では転落事故を再現したモデルを用い,転落姿勢などを変更することで算出された解析を基に,転落挙動が頭部傷害値にどのような影響を及ぼすのか評価を行う.
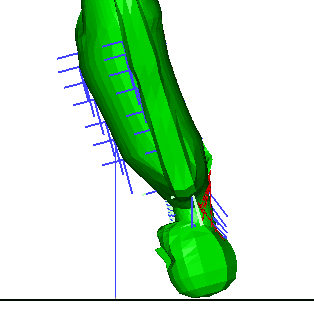 |
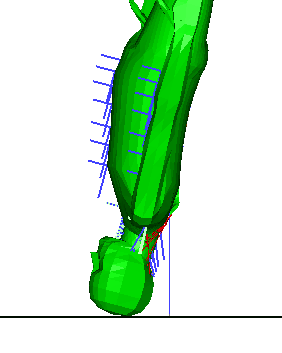 |
| 前頭部からの衝突 | 後頭部からの衝突 |
メンバー
志賀 (M2) 荻野 (B4)
剖検例に基づく大型二輪車乗員の傷害解析
概 要
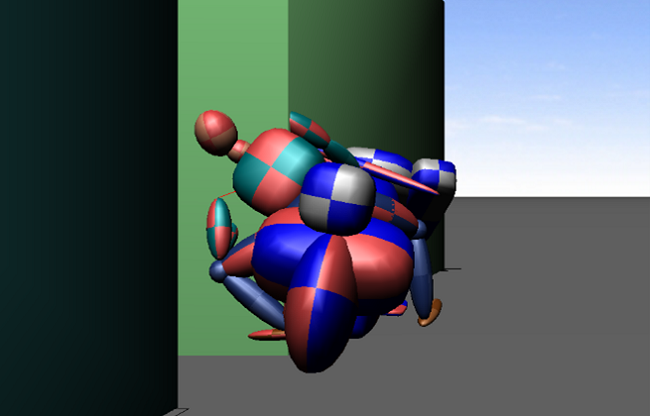
現在,自動二輪車は車両外の構造物等へ乗員が衝突することによる死亡事故や重傷事故が多く,受傷メカニズムが多岐にわたり,安全対策を一般化することは困難である.安全対策を向上させるためには,実際の事故に対する安全装置などの有効性の検証が重要である.そこで,本研究では,実際に大型二輪車乗員が死亡した単独事故の剖検例について,乗員傷害の評価,安全装置などの有効性の検討を目的とし,CAE解析を用いて傷害解析が可能な事故再現シミュレーションを作成する.
 |
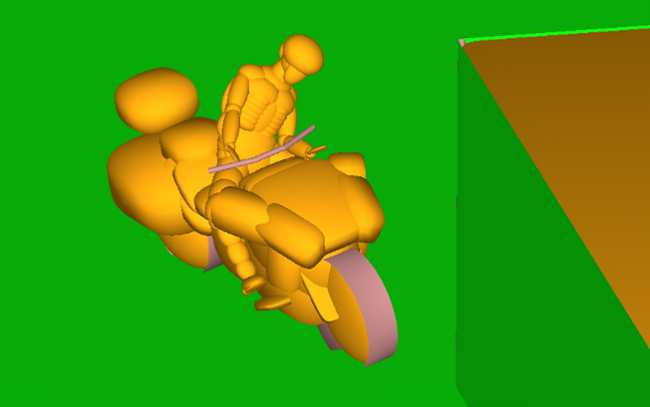 |
| PC-Crashを用いた事故再現 | Madymoを用いた傷害予測 |
メンバー
中村 (M1) 山田 (B4)
ボラードと自動車の衝突事故における鑑定手法の研究
概 要
交通事故後に実施される事故鑑定において,車両の衝突速度を推定することは事故状況を把握する際に重要な要素になる.ボラードと車両の衝突事故においては,衝突と被衝突物である双方に対し変形が生じるため,事故鑑定においては車両及びボラードの変形を加味する.にもかかわらず,車両自体の変形量に基づく吸収エネルギなどは多くの研究がなされているが,路上の工作物を変形させた場合の吸収エネルギについての研究は少ない.従ってボラード単体での吸収エネルギの評価を行い,既存の事故鑑定に加味することで鑑定制度の向上が見込まれる.本研究ではコの字型ボラード対車両における,衝突後のボラードの永久変形量とボラードの吸収エネルギの関係を明らかにすることを目的とする.
メンバー
松本 (M1) 前山 (B4)
パーソナルトランスポーターの隊列走行制御システムの研究
概 要
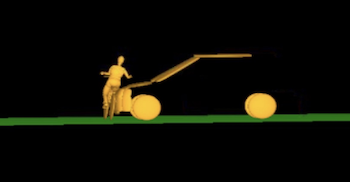
近年,segway®personal Transporterなどの登場により移動支援ロボット(以下,PT)をはじめとする超小型モビリティが注目されている.現在,PTは国内においても観光地や空港の警備などで用いられている.PTは個人に対して比較的自由な移動範囲を提供できる一方で,乗り捨てられたPTを運搬,回収する際には台数分の人員や労力が必要となることが課題である.この問題を解決するために,先頭のPTのみ人が操縦し,後続のPTが自動で追従する隊列走行を行うことがあげられる.本研究では単眼カメラを用いて自己位置推定を行い,旋回追従制御システムの構築やモデル化誤差低減に向けたロバスト制御システムの構築を行う.また,PTの隊列走行時の追従性能や社会的受容性を評価する.
 |
| 実験風景 |
メンバー
村田 (M2) 大林 (M1) 内藤 (B4) 平田 (B4)
電動キックボードのシミュレータ構築に関する研究
概 要
近年,視認性と機動性に優れた電動キックボードが欧米を中心に利用されている.日本においても,普及が進んでいる.一方乗員の不注意等による事故が報告されていることから電動キックボードの運転特性を知ること,また安全確保や実験条件統一のためのシミュレータを用いた研究が重要となる.そこで本研究ではシミュレータの構築と再現性,有効性の評価を目的とする.研究手法として,ゲームエンジンを用いた電動キックボードのシミュレータソフトを構築し,モーション台と連結させ,左右の体重移動やアクセル,ブレーキによる運動方程式をモーション台やシミュレーションに反映させるすることで電動キックボードの運転を模擬する.
 |
| シミュレータ環境 |
メンバー
高橋 (B4)
自動車の遠隔操縦における車幅間隔の認知に関する研究
概 要
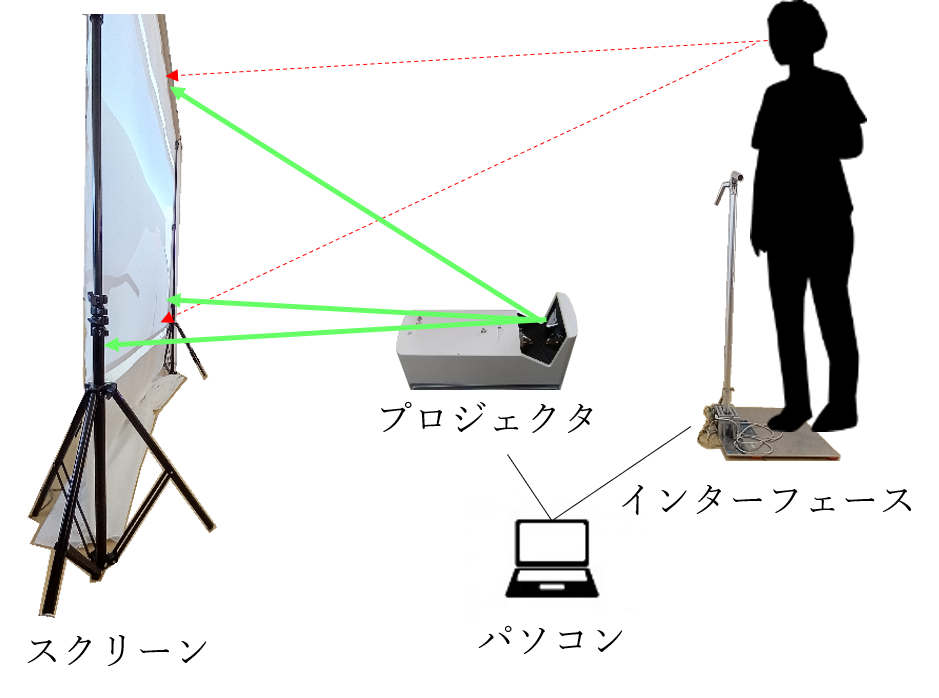
自動車の自動運転技術が進歩する一方,複雑な交通環境下によって生じる自動運転システムの判断不能によって停車する問題などが挙げられる.そこで,このような問題の対策として,遠隔操縦によるバックアップが検討されている.遠隔操縦は実際の運転環境と異なり,通常の運転と比べて大きく運転の操作感が異なっている.したがって,運転支援システムを実装することが有効であると考えられる.本研究では遠隔操縦に適したHMIの考案をし,HMIを実装したドライビングシミュレータを用いて,実車相当の環境を再現し実験を行う.そして遠隔操縦における操縦者の運転特性を明らかにすることで,HMIの有効性を明らかにすることを目的とする.
 |
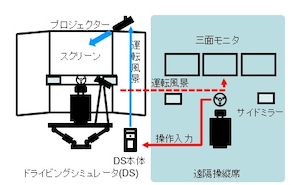 |
| ドライビングシミュレータ | 遠隔操縦のシステム |
メンバー
平塚 (M1) 杉森 (B4) 田原 (B4)
操舵支援システムに対するドライバの適応に関する研究
概 要
近年,ヒューマンエラーによる事故を減らす目的として運転支援システムや自動運転などの開発が行われている.現状の運転支援システムは人間主体のシステムのため,受容性を考慮し修正操舵力が抑制されている.一方で,運転支援を強くすると制御性能は上昇するが,受容性は低下する.そのため,運転支援システムにおける制御性能と受容性の両立が課題となっている.本研究では,ドライバに受容されるシステム中心の操舵支援システムの作成を目的とする.
 |
 |
| ドライビングシミュレータ | 等価二輪モデル |
メンバー
小谷 (M2)
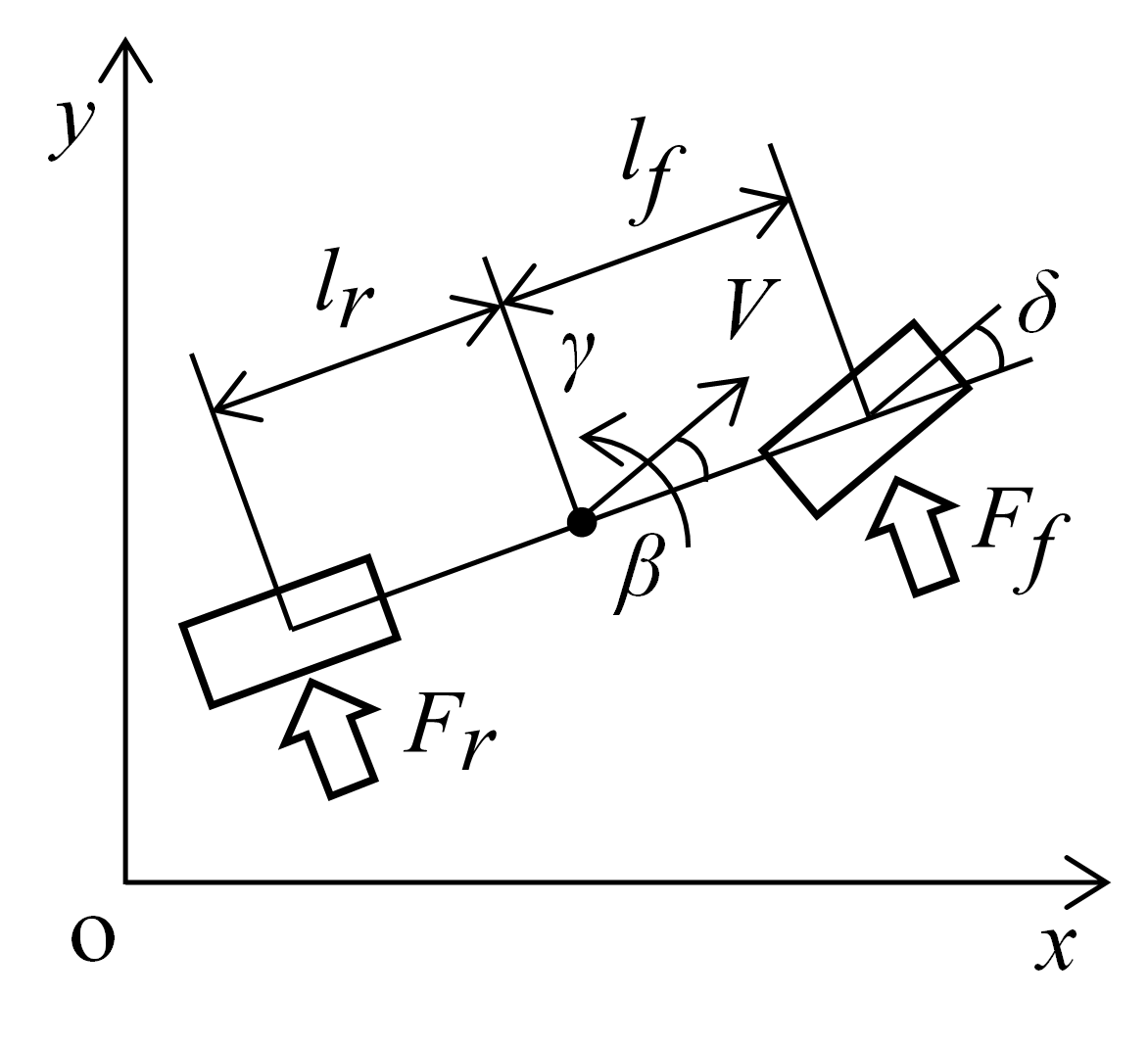
高速道路における自動運転トラックの合流制御アルゴリズム
概 要
近年,ネット通販の浸透により高速道路における自動運転トラックの実用化に向けて,自動運転トラックに必要な制御システムの開発期間の短縮は重要な課題となっている.しかし自動運転トラックの実車検証を行うことは安全面において危険性があり,コスト面において時間やお金がかかってしまう.この課題の解決策としてモデルベース開発のHILS(Hardware In the Loop Simulation)・MILS(Model In the Loop Simulation)があげられる.本研究では高速道路の合流部を走行する際の自動運転トラックの合流制御アルゴリズムの構築を目的とする.そこでHILS・MILSのシミュレーション環境を用いて,合流部における交通環境を再現し,合流制御アルゴリズムの評価および有効性の検討を行う.
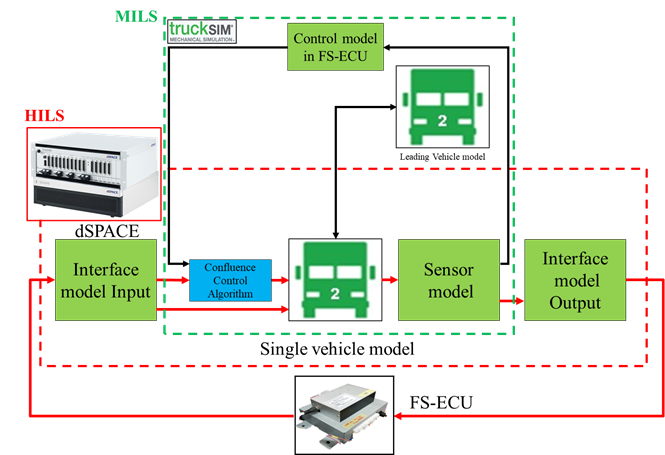 |
 reference |
| シミュレーション環境 | 自動運転トラックレベル4 |
メンバー
渡辺 (M2)
ファジイ推論を用いた自動運転バスの制御ゲインのセルフチューニング
概 要
バスは過疎地域での主要な移動手段として期待されているが,近年高齢化によるドライバ不足,資金不足等の問題により走行本数が少なくなっているという課題に直面している.その解決策として,自動運転バスの開発が進められている.現状では,自動運転バスの制御ゲインは人の手によってそれぞれチューニングされている.しかし,実際の道路環境では,環境ごとに最適なゲイン値が異なるため,目標軌道への追従性が低下する可能性がある.そこで本研究では,ファジイ推論を用いた制御ゲインのチューニング自動化,精度の向上を目的としシミュレーション解析を行い,その解析結果を基に実車実験による評価を行う.
 実験事例(先進モビリティ株式会社) |
| 自動運転バスの実証実験の例 |
メンバー
渡辺 (M2) 櫻井 (B4) 冨澤 (B4)
歩行者と超小型モビリティが親和する自動走行経路の設計
概 要
近年,自動車業界は100年に一度の変革期を迎えており,変革の影響は道路インフラにも及ぶことが予想されている.これを背景として,既存の道路機能に歩行者が滞在し交流する賑わい空間機能を加え,人を中心とする歩車共存に向けた道路空間への再編が検討されている.この道路空間を走行する自動走行車両の一例として,超小型モビリティの導入が見込まれている.自動走行車両を導入する際,走行経路に関しては安全性に加え,歩行者への心理的な安心の確保が必要である.そこで,本研究では「賑わい空間」としての道路の在り方に基づく,歩行者の安全だけでなく安心にも配慮した,周囲と親和する超型モビリティの自動走行経路の構築を目的とする.
 |
 |
| 模擬車両 | シミュレーション映像 |
メンバー
小谷 (M2) 西畑 (B4)