東京都市大学 工学部機械工学科 機械力学研究室
Mechanical Dynamics Laboratory, Tokyo City University
〒158-8557 東京都世田谷区玉提1-28-1
世田谷キャンパス 10号館3階
令和3年度 研究テーマ
![]() 6分力ホイールセンサにおける荷重伝達の検討
6分力ホイールセンサにおける荷重伝達の検討
![]() ばね剛性を用いた荷重伝達手法の考察
ばね剛性を用いた荷重伝達手法の考察
![]() 指標Ustarを用いた剛性線導出システムの構築
指標Ustarを用いた剛性線導出システムの構築
![]() ミニカーの対普通車前面衝突時における衝突安全性に関する研究
ミニカーの対普通車前面衝突時における衝突安全性に関する研究
![]() ミニカーの対車両側面衝突時における衝突安全性に関する研究
ミニカーの対車両側面衝突時における衝突安全性に関する研究
![]() ボラードと自動車の衝突事故における鑑定手法の研究
ボラードと自動車の衝突事故における鑑定手法の研究
![]() 歩行者対自動車衝突時における歩行者の挙動に関する研究
歩行者対自動車衝突時における歩行者の挙動に関する研究
![]() 自転車乗員のための先進事故自動通報システムの構築に関する研究
自転車乗員のための先進事故自動通報システムの構築に関する研究
![]() 機械学習に基づく転落時の頚椎損傷の予測
機械学習に基づく転落時の頚椎損傷の予測
![]() 自動車室内における騒音低減に用いる吸遮音材に関する研究
自動車室内における騒音低減に用いる吸遮音材に関する研究
![]() パーソナルトランスポーターの隊列走行制御システムに関する研究
パーソナルトランスポーターの隊列走行制御システムに関する研究
![]() パーソナルトランスポーターのシミュレータ構築に関する研究
パーソナルトランスポーターのシミュレータ構築に関する研究
![]() 自動車の遠隔操縦における運転特性とインターフェイスに関する研究
自動車の遠隔操縦における運転特性とインターフェイスに関する研究
![]() 大型トラックのPath Following制御におけるロバスト性の向上に関する研究
大型トラックのPath Following制御におけるロバスト性の向上に関する研究
![]() 操舵支援システムに対するドライバの適応に関する研究
操舵支援システムに対するドライバの適応に関する研究
![]() 大型トラック隊列走行におけるモデルベース開発の適用
大型トラック隊列走行におけるモデルベース開発の適用
![]() 隊列走行システムの曲線道路走行におけるHILSの研究
隊列走行システムの曲線道路走行におけるHILSの研究
6分力ホイールセンサにおける荷重伝達の検討
概 要
6分力ホイールセンサは,センサ各部でひずみを計測することで走行時の路面入力を計算するセンサであり,車両挙動の解析や車両挙動のシミュレーションデータの収集等に用いられる.ホイールセンサには耐荷重性能や検出精度の向上が求められており,設計においてはホイールセンサ内の荷重伝達を把握することが重要である.構造内の荷重伝達を定量的に表現する指標としてUstarが提案されており,Ustarから構造物における荷重伝達を把握することができる.本研究では,CAEによりホイールセンサ内で荷重伝達の様子を明確化する.これにより,剛性が高く,高い精度でひずみを検出するセンサの構造を提案する.
メンバー
稲村 (M1) 志賀 (B4)

ばね剛性を用いた荷重伝達手法の考察
概 要
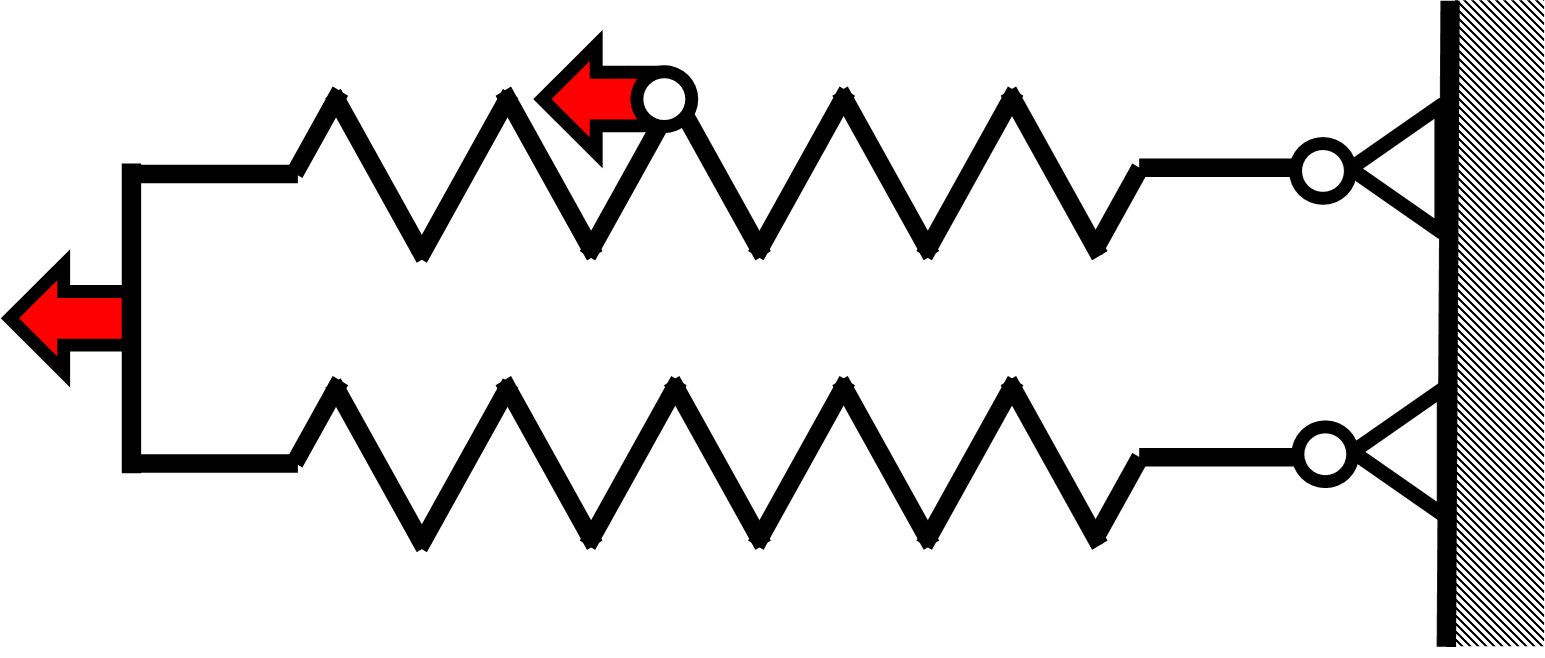
近年,車体部品などで軽量化と高強度化の両立を実現するために構造設計において構造最適化手法が多用されている.しかし,最適化結果は有効な構造設計の指標にはなるものの,最適化結果に至るまでの過程を工学的なメカニズムと関連付けて読み解くことは難しい.そこで,与えられた設計仕様のなかで軽量かつ無駄のない構造設計を行うには,構造のもつ性質や機能を把握することが重要となる.本研究では,弾性体構造物を並列ばねから成る構造物と仮定し,作用・反作用の法則を再現した荷重伝達を可視化する表現手法を考案し,高強度化と軽量化の要件を満たすような構造を同時に検討する際の指針として利用することができる指標を確立する.
 |
 |
| 並列ばねによる構造物の表現 | 円孔板におけるばね剛性分布と剛性線 |
メンバー
岸 (M2)
指標Ustarを用いた剛性線導出システムの構築
概 要
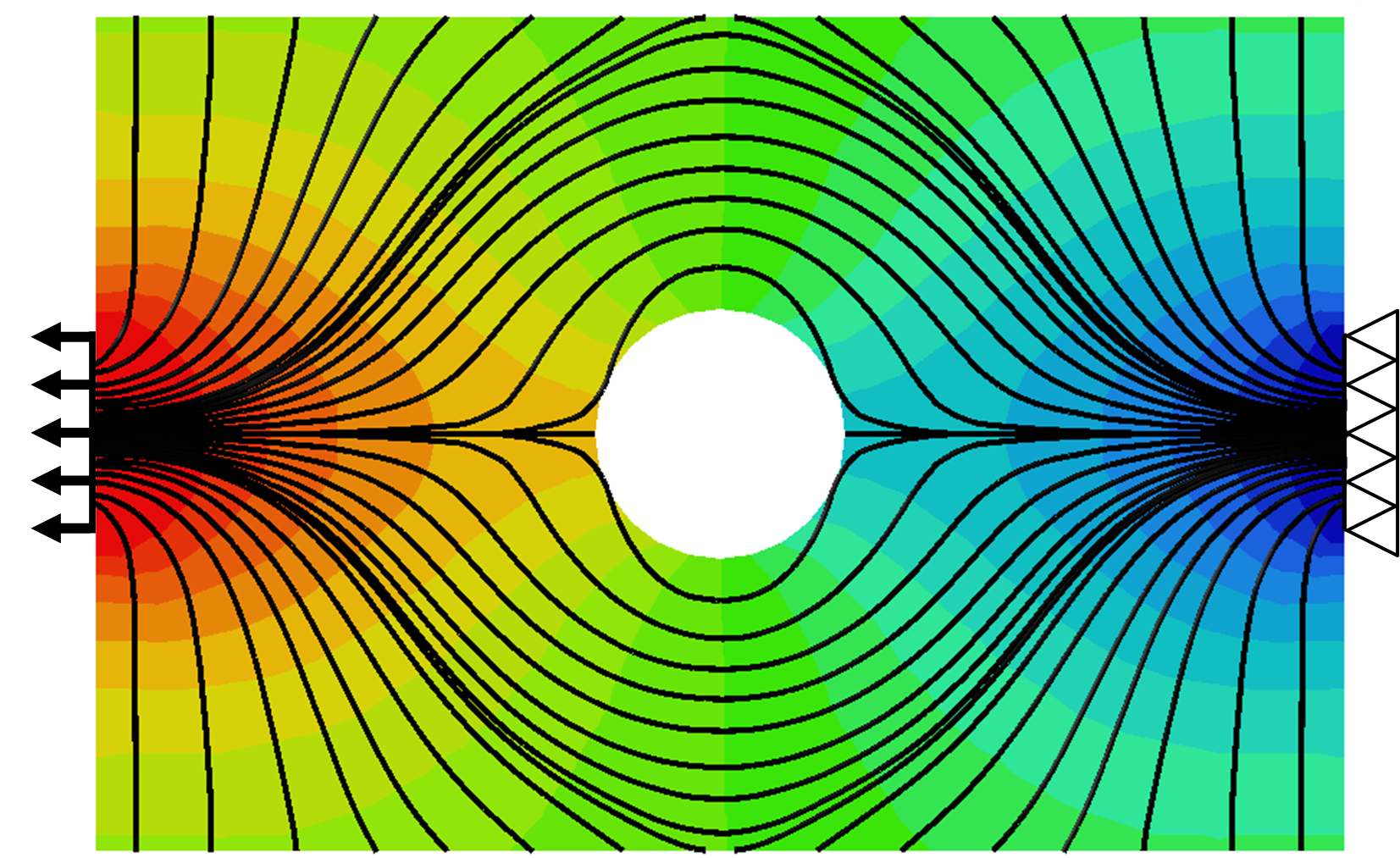
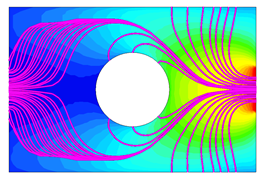
構造物における荷重が通る道筋である剛性線を把握することで,構造各部の機能を明らかにしながら設計を進めることが可能となる.そこで,荷重伝達を定量的に表現する手法として指標Ustarおよび近似的な剛性線導出の手法が提案されている.本研究では,既存のシステムにおける課題点を解決し,複数種類の要素で構成された複雑な構造において,Ustarの勾配に基づく厳密な剛性線を導出するシステムの構築を行う.さらに構築したシステムを乗用車車体モデルに適用し,合理的な対応を含めた形で剛性線導出システムを提案する.これにより複雑な構造物において,剛性線を導出し評価方法を確立することで,荷重伝達の観点から優れた構造の設計に活かす.
 |
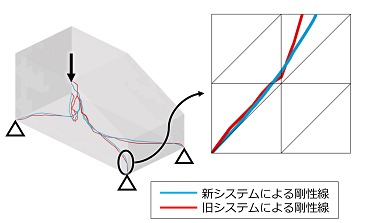 |
| 円孔板におけるUstarと剛性線 | 三次元構造物における剛性線 |
メンバー
野々部 (M2) 鈴木 (B4)
ミニカーの対普通車前面衝突時における衝突安全性に関する研究
概 要
現在,自動車の環境性能への関心の高まりに加え,高齢者の移動手段や小口配送,都市部や観光地での移動手段として,ミニカーを含む超小型モビリティの活用が期待されている.しかしながら,ミニカーは衝突安全性に関して法規や自動車アセスメントにおいて安全基準が定められていない.また,ミニカーの事故件数において対普通車が最も事故発生件数が多いため,ミニカー対普通車の衝突安全性について検討する必要がある.そこで本研究ではミニカーの対車両前面衝突時に着目し,車体の変形量や乗員の傷害値について検討する.
 |
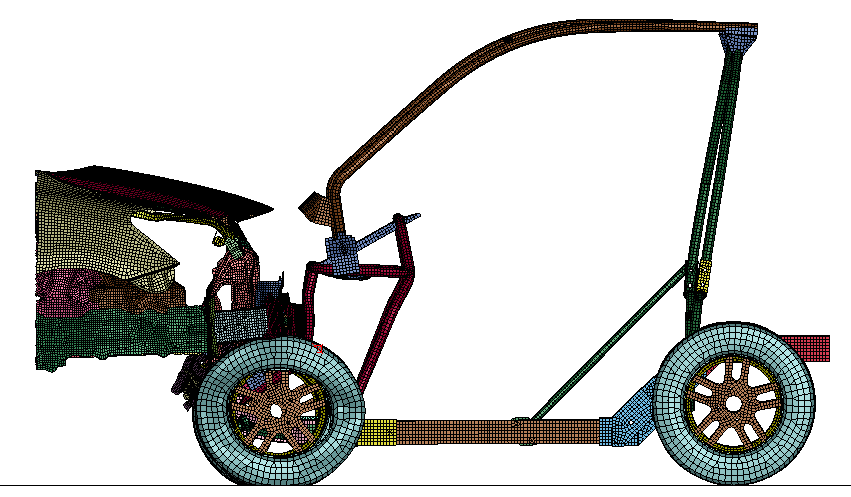 |
| 衝突実車試験 | 衝突解析モデル |
メンバー
藤井 (M2)
ミニカーの対車両側面衝突時における衝突安全性に関する研究
概 要
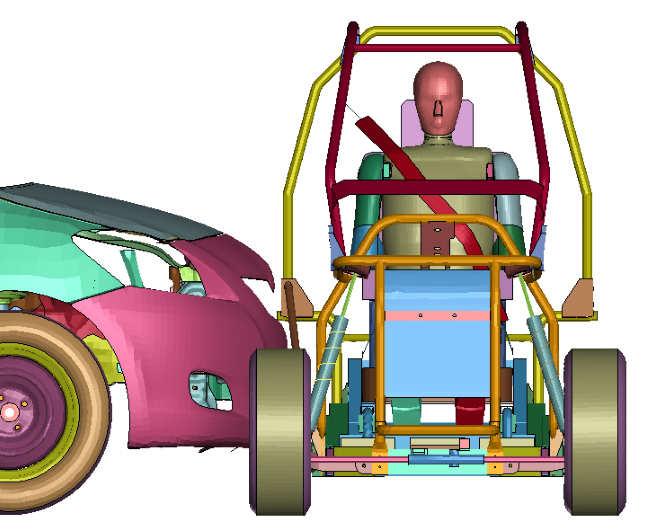
近年、我が国では高齢化や自動車に対する環境性能への関心が高まっているのに加え、小口配送の需要への効率的な対応によって物量の活性化させることなどミニカーを含む超小型モビリティの活躍が期待されている.しかしながら、ミニカーは車両側面にエネルギーを収集する構造を持たない車両が多い.また、ミニカーにおける対車両の事故形態では出会い頭の事故が最も多いことが分かっており、対車両の衝突安全性について検討する必要がある.そこで、本研究ではミニカーの対車両側面衝突に着目し,車体の構造や乗員の傷害値について検討する.
 |
 |
| 解析モデル | 実車実験 |
メンバー
寺沢 (M1) 星野 (B4) 尾池 (B4)
ボラードと自動車の衝突事故における鑑定手法の研究
概 要
事故の再現をする上で,事故当時の車両の衝突挙動を再現する必要がある.そのためには,車両の衝突速度を把握する必要があり,事故現場の路面痕跡や事故車両の損傷状態から推定する必要がある.衝突速度の推定に用いられる主要な手法として,エネルギ保存則に基づく推定手法が用いられており,衝突時の車両の運動エネルギを算出することで衝突速度を推定している.しかし,車両とボラードの衝突事故では車両だけではなくボラードにも変形が生じる.そのため,ボラードの永久変形量と吸収エネルギの関係を明らかにし既存の事故鑑定に加味することで鑑定制度の向上が見込まれる.本研究では,埋め込み型のボラード対車両における衝突後のボラードの永久変形量と吸収エネルギの関係を明らかにすることを目的とする.
 |
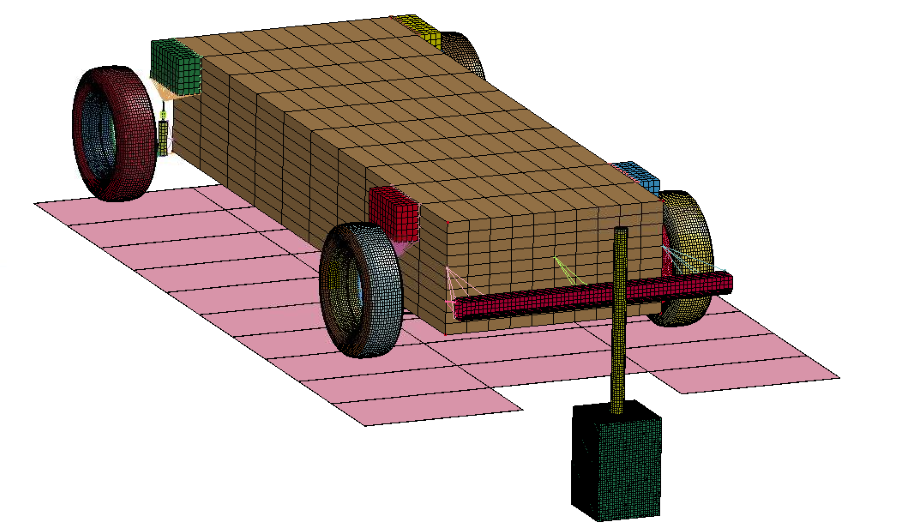 |
| 実車衝突実験 | 解析モデル |
メンバー
藤井 (M2) 田澤 (B4)
歩行者対自動車衝突時における歩行者の挙動に関する研究
概 要
令和2年,日本の交通事故死亡数は2839人となり減少傾向が続いている.しかし歩行中の死亡事故件数割合は最も高い割合の状態が続いており死亡事故件数減少にはさらなる対策が必要である.日本では歩行者頭部保護性能試験をはじめとした歩行者保護性能試験が導入されているが,衝突後の乗員挙動に関する検討は十分に行われていない.先行研究では自動車との衝突後歩行者回転量が1.25回転のときに路面との衝突が発生すると頭部傷害値が最大にとなることが分かっている.そこで本研究では歩行者対自動車に着目し,頭部傷害値が最大となる歩行者回転量1.25回転となる衝突条件の明確化および歩行者回転量低減のための車両諸元の明確化を目的とする.
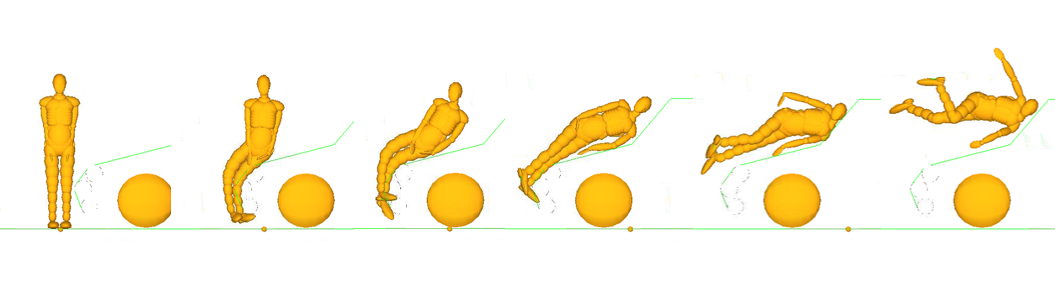 |
| 解析モデル |
メンバー
寺沢 (M1) 千葉 (B4)
自転車乗員のための先進事故自動通報システムの構築に関する研究
概 要
わが国では,令和7年までに年間の死傷者の数を2,000人以下とし,世界一安全な道路交通の実現を目指す第11次交通安全基本計画が掲げられている.令和二年の自転車,自動二輪車,歩行者を含めた状態別交通事故死者数の割合は約68%を占めており,交通弱者のための先進事故自動通報システム(以下,AACN)が実用された際の効果は自動車乗員以上に期待される.そこで,交通弱者の多くが保有しているスマートフォン(以下,スマホ)の加速度計に着目することでAACNアルゴリズムの構築を行う.本研究では,スマホのデータを用いたアルゴリズム構築において,加速度計のダイナミックレンジやサンプリング間隔の性能に合わせた解析手法を検討する.そこで,CAE解析によるモデル化を行い,事故状況のパラメータスタディを行うことで,加速度波形とスマホの計測波形の模擬生成を行う.
 |
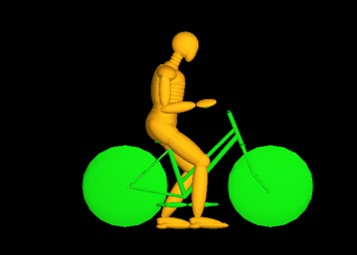 |
| 自転車乗員モデル | CAEによるモデル化 |
メンバー
野中 (B4) 藤原 (B4)
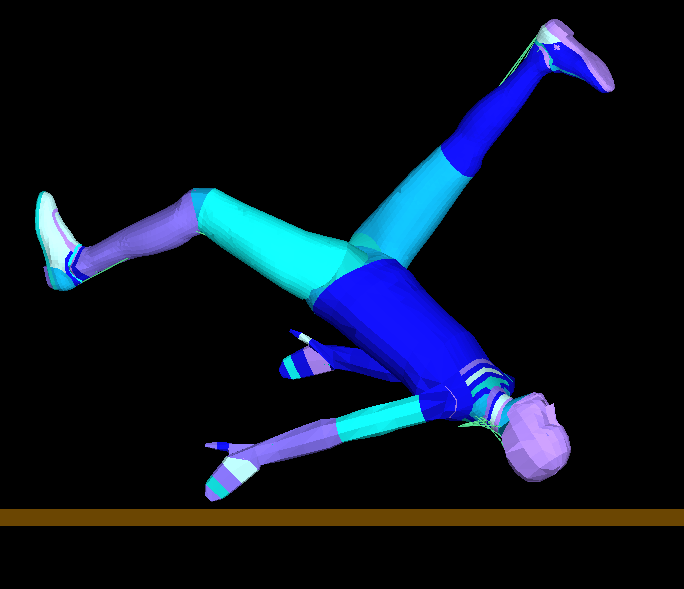
機械学習に基づく転落時の頚椎損傷の予測
概 要
国内の労働災害において墜落・転落事故は高い割合を示している.墜落・転落事故では墜落高さが大きいほど重症化することが予想される.しかし,墜落高さが小さい場合においても頚椎への荷重のかかり方により重大な事故につながる可能性もある.そのため,墜落・転落事故時は救命処置として受傷者の頭部,また頚椎の保護が優先される. 本研究では,転落姿勢に作用する因子を特定し,その因子を解析条件とし解析を行う.また,機械学習を用いて転落・墜落状況から傷害の予測を立てられるようにするために,転落・墜落事故の救命時に解析結果を使用し,転落・墜落事故時の受傷者の重症度を受傷者の体格および環境等の諸因子から判断を行えるシステムを構築する.
 |
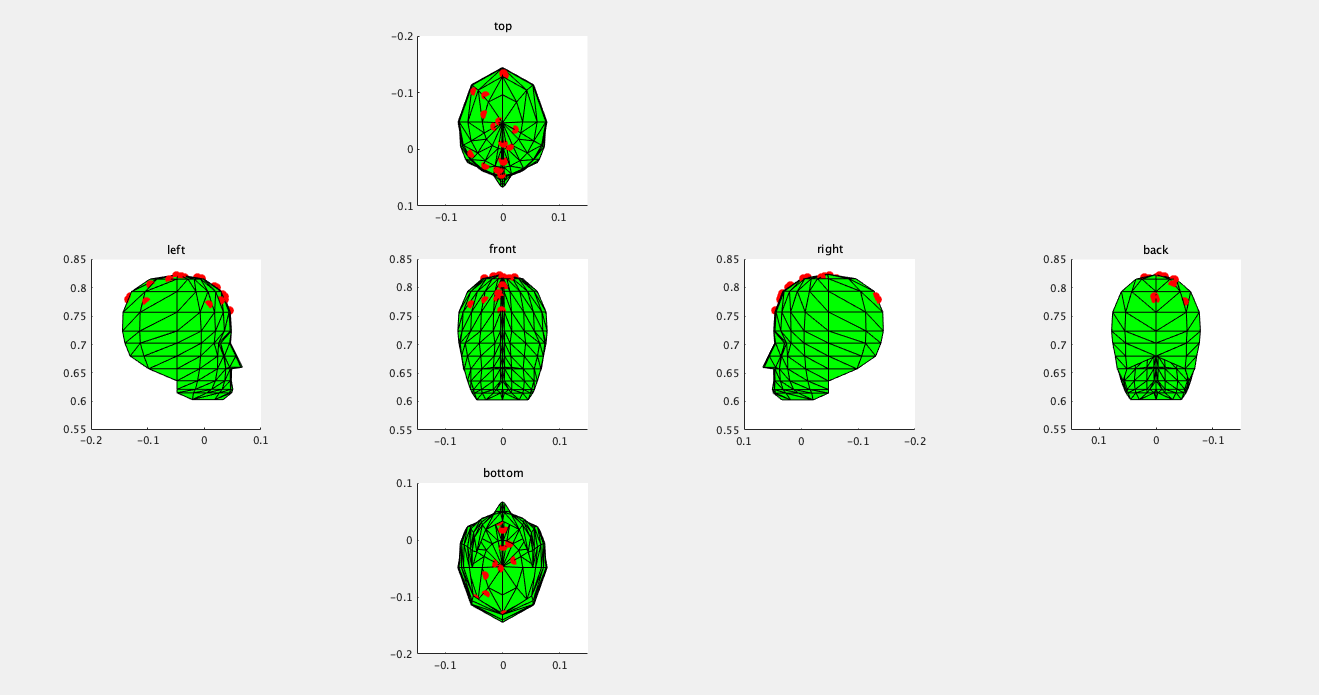 |
| 転落姿勢の解析 | 転落条件による頭部衝突位置のばらつき |
メンバー
岸 (M2) 竹腰 (B4)
自動車室内における騒音低減に用いる吸遮音材に関する研究
概 要
自動車室内の騒音低減は,自動車の快適性のために求められる重要な課題である.自動車室内の騒音を低減する方法の一つとして,音を吸収あるいは遮断する吸遮音材をフロアや屋根の内部に設置する方法が用いられている.一般的に吸遮音材は多量に用いる程より大きな騒音低減効果が期待できるが,一方で車室内のレイアウトによる制約やコスト増加が問題となる.そのため,自動車の快適性向上のためには吸遮音材の性能を向上させる必要がある.そこで本研究ではCAE解析によってより騒音低減に効果的な吸遮音材の開発および改良を行い,快適性の高い車室内空間を提案することを目的とする.
メンバー
石高 (M2) 望月 (B4)
パーソナルトランスポーターの隊列走行制御システムに関する研究
概 要
近年,Segway® Personal Transporterなどの搭乗型移動支援ロボット(以下,PT)をはじめとする超小型モビリティが注目されている.超小型モビリティは短距離から中距離の移動に適しており,またCO₂や大気汚染物質を排出しない.その特徴を生かし現在,観光地や大型施設内での移動手段として用いられている.PTは個人に対して比較的自由な移動範囲を提供できる一方で,乗り捨てされたPTを運搬、回収する際には台数分の人員や労力が必要となることが課題である.この問題を解決するために,先頭のPTのみ人が操縦し,後続のPTが自動で追従する隊列走行を行うことが挙げられる.本研究ではPT実機を用いて隊列走行制御システムを構築し,隊列走行時の追従性能や社会受容性を評価する.
 |
| PT実機 |
メンバー
青柿 (M2) 相澤 (B4) 村田 (B4)
パーソナルトランスポーターのシミュレータ構築に関する研究
概 要
近年,視認性と機動性に優れたSegway®などのパーソナルトランスポーター(以下PT)が欧米を中心に利用されている.日本においても観光ツアーや警備に採用され,導入の機運が高まっている.一方海外では不注意等による事故が報告されており,運転者に障害物を認知させる運転支援が必要である.運転支援の評価するにあたり,安全の確保や実験条件を統一できるシミュレータを用いる実験が重要となる.そこで本研究ではインターフェースを用いたシミュレータの構築を目的とする.その手法として,ゲームエンジンを用いたPTのシミュレータを構築し,インターフェースで乗員の重心位置を運転挙動に反映する事でPTの運転を模擬する.
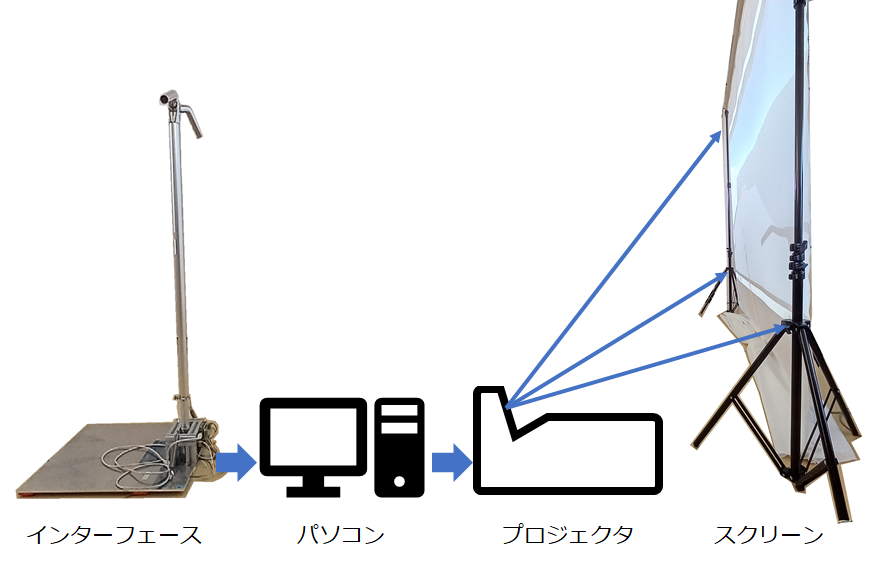 |
| シミュレータ |
メンバー
青柿 (M2) 柴沼 (M1) 瀬賀 (B4)
自動車の遠隔操縦における運転特性とインターフェイスに関する研究
概 要
近年自動運転技術による無人運転の実用化が進められており、既に自動運転レベル3の車両が市場に投入されるなど今後もさらなる社会実装が期待される.しかし,現段階の自動運転システムには,複雑な実交通環下においてシステムが保守的な判断を下し,一般交通流の阻害につながる可能性がある.この対策として遠隔操縦の活用が期待されている.しかし,実際の運転と異なり,体感情報が不足するため,遠隔操縦者の負荷が大きいと想定される.そこで,システムによる運転支援が有効であると考えられる.本研究では,遠隔操縦の運転特性をドライビングシミュレータ実験により明らかにし,遠隔操縦に適したインターフェイスを考案することを目的としている.
 |
 |
| ドライビングシミュレータ | 遠隔操縦 |
メンバー
石川 (M1) 吉川 (B4)
Path Following制御におけるロバスト性の向上に関する研究
概 要
自動車のCO2排出量や大型トラックのドライバ不足が課題となっており,対策として大型トラックの後続無人隊列走行の実用化が期待されている.先行研究において,トラックの隊列走行における操舵制御はPath Following制御が提案されている.しかし,本制御手法はモデルベース制御であるため,積載状態の変化や経年変化により,車両状態の変化が生じた場合は制御性能が劣化する恐れがある.本研究では,適応機構をPath Following制御に導入し,車両状態の変化に対するロバスト性の向上を目的とする.
 |
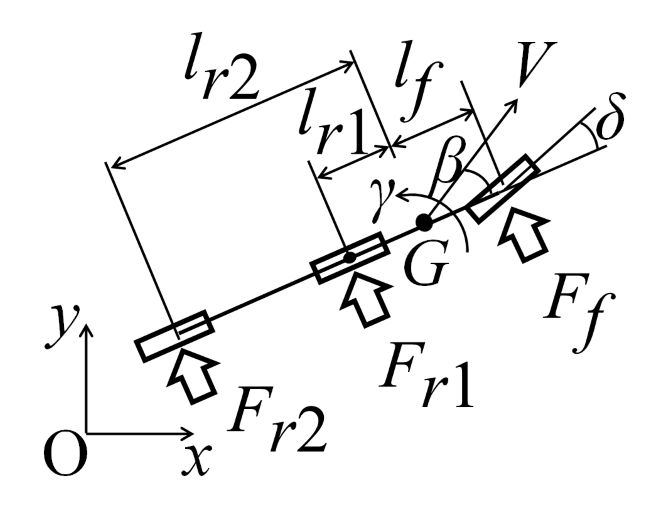 |
| シミュレーションの様子 | 等価二輪モデル |
メンバー
市原 (M2)
操舵支援システムに対するドライバの適応に関する研究
概 要
近年,ヒューマンエラーによる事故を減らす目的として運転支援システムや自動運転などの開発が行われている.現状の運転支援システムは人間主体のシステムのため,受容性を考慮し修正操舵力が弱くなっている.一方で,運転支援を強くすると制御性能は上がるが,受容性は低下する.そのため,運転支援システムにおける制御性能と受容性の両立が課題となっている.本研究では,ドライバに受容されるシステム中心の操舵支援システムの作成を目的とする.
 |
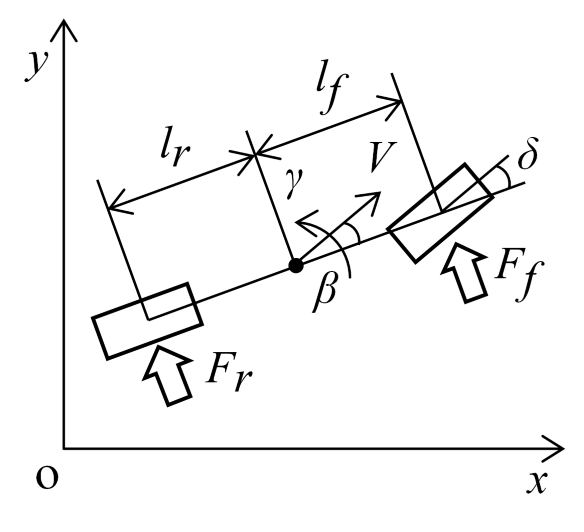 |
| ドライブシミュレーター | 等価二輪モデル |
メンバー
市原 (M2) 小谷 (B4)
大型トラック隊列走行におけるモデルベース開発の適用
概 要
近年,大型トラックにおける後続車無人の隊列走行技術の商業化のため,隊列走行に必須な制御システムの開発速度向上は重要な課題となっている.隊列走行の実車を用いた検証において,要求仕様を満たさない場合,その原因を発見し,システムを改良する必要がある.しかし,安全上の観点などから原因の特定に時間がかかるなどの課題が存在する.そこで,モデルベース開発(MBD: Model Based Development)の適用が有効であると考えられている.しかし,大型トラックの隊列走行においてMBDはまだ導入されていない.本研究では隊列走行の制御システム開発にMBDを適用し,その再現性を検証することを目的とする.
 |
 |
| ドライビングシミュレータ reference |
シミュレーション環境 |
メンバー
庄司 (M2)
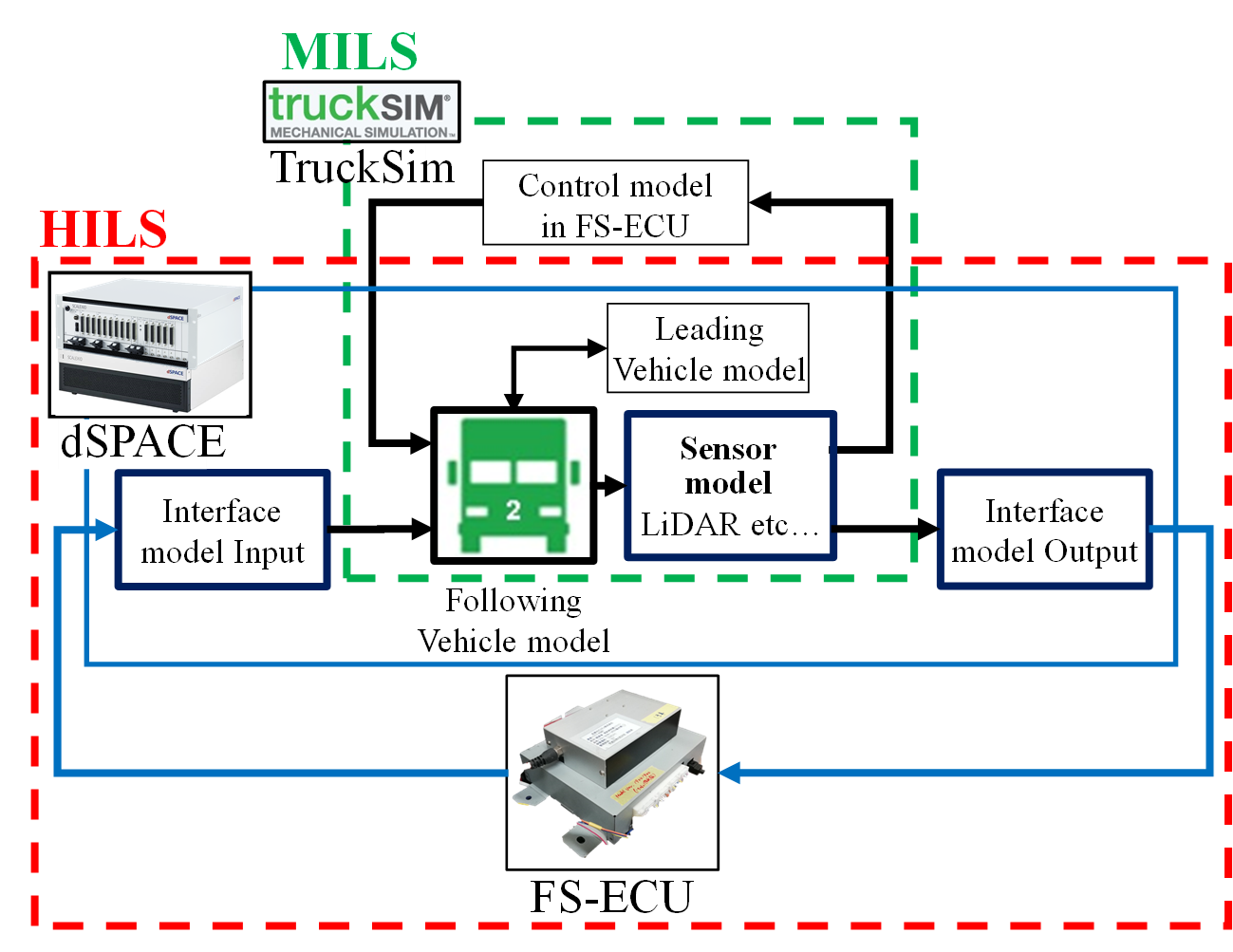
隊列走行システムの曲線道路走行におけるHILSの研究
概 要
近年,トラックの物流業界においてトラックドライバー不足,運送の効率化などの問題点があげられる.これらの解決策として大型トラックの隊列走行システムの開発が考えられる.しかし実車検証を行うことは安全面において危険性があり,コスト面において時間やお金がかかってしまう.そこで実車走行に近いシミュレーション検証ができるHILS(Hardware In the Loop Simulation)を用いて検証実験を行う.本研究では,隊列走行システムの開発期間の短縮を目的とし,HILSを用いて曲線道路走行における大型トラックの隊列走行システムの後続車両の操舵特性・シミュレーションの再現性の評価を行う
 reference |
| 曲線道路における隊列走行の実車走行 |
メンバー
庄司 (M2) 渡辺 (B4)